Solução Scara: Da ideia ao produto Parte 2
Nayara Espinaci | 22nd dezembro 2020
O pacote da Epson chegou
“Já é Natal?” ou “Hm, mas eu não pedi nada!”. Quando chega ligação do departamento de recebimento de mercadorias: “Seu pacote está aqui.”. Algo assim isso poderia ter acontecido com a chegada do manipulador G6-553S RC620, que recebemos da Epson GmbH para teste a fim de desenvolver uma solução Scara.

Rapidamente procuramos uma vaga em nosso laboratório de testes de 3.800 m² em Colônia. Antes de aparafusar o robô na mesa, precisamos verificar se a entrega está completa. No entanto, a tentação de iniciar sem primeiro verificar as peças individuais fornecidas foi extremamente grande. A próxima imagem mostra que depois de aparafusar o robô na mesa, mantivemos a cabeça fria e decidimos checar a nota de entrega. Como esperado, a entrega foi concluída. Obrigado Epson.

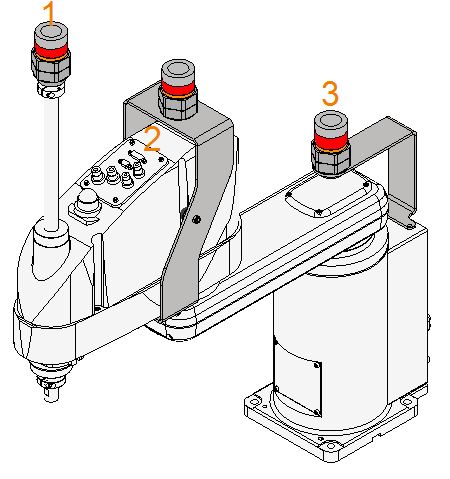
Após os primeiros testes funcionais do robô, fizemos as medições para o primeiro esboço. O objetivo é desenvolver um fornecimento de energia compatível em série entre o ponto de conexão traseiro (3) e o fuso de esferas, bem como uma conexão entre o fuso de esferas (1) e o painel de controle do robô (2). Ambas as conexões têm suas armadilhas e quais são em detalhes mostraremos nas próximas seções.
Desafio #1
Encontre o toque certo.
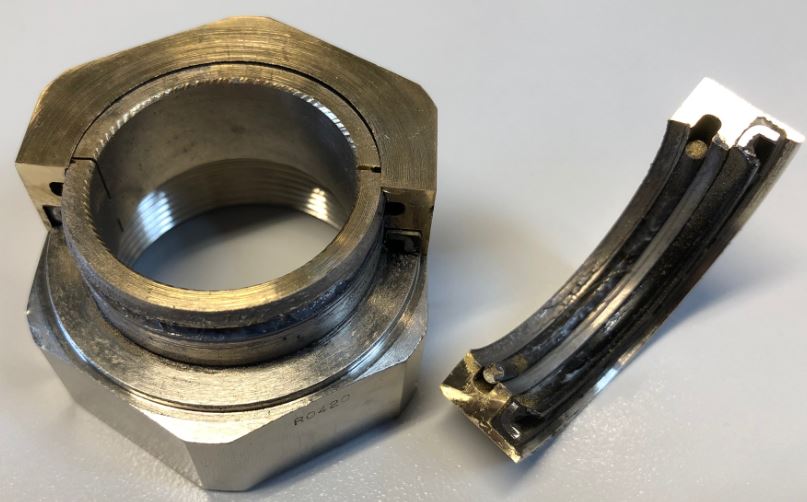
Na parte 1 você viu como nosso cliente automotivo da Suábia percebeu a conexão entre 1 e 3 com uma conexão rotativa e alguns outros pequenos ajustes. Também gostaríamos de desenvolver esta conexão giratória para o produto de série. A dificuldade é que, por um lado, pode ser girado com muita facilidade e, por outro lado, deve poder ser preso aparafusado em ambos os lados. Resolvemos a facilidade de torneamento graças à nossa ampla experiência no campo de buchas autolubrificantes. Na imagem 4 a seguir você pode ver os primeiros esboços. No lado esquerdo da imagem você já pode ver como a conexão giratória deve ser fixada no suporte. O que nos leva ao desafio #2.
Desafio #2
Espessura do material e pontos de fixação para o suporte
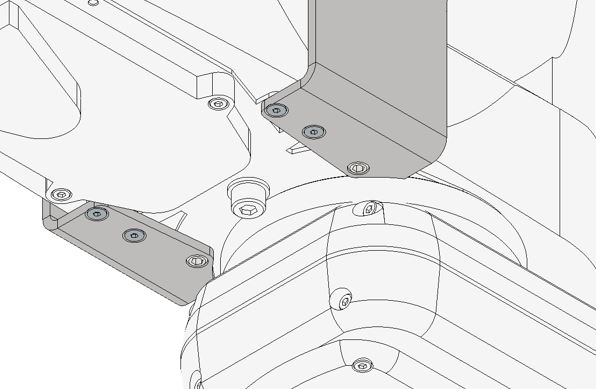
Como pode ser visto na imagem 3, infelizmente nem sempre existe a opção de instalar um acessório adicional no robô. Na primeira tentativa, decidimos prendê-lo por baixo usando um suporte (veja a imagem 5). Aqui é importante prestar atenção especial à espessura do material em termos de peso e possível comportamento de vibração. Admitimos que ainda não estamos 100% satisfeitos com a solução atual. Também foi necessário determinar o tipo de fixação para a conexão rotativa. Duas opções foram selecionadas.
- Conexão em forma de U para fácil montagem e desmontagem do sistema com conectores
- Conexão fechada que oferece mais estabilidade
A fim de economizar peso e possivelmente simplificar a troca de todo o pacote Scara, pensamos que o suporte em forma de U seria uma solução elegante. Lá, o pacote teria sido empurrado pela lateral e emperrado. Devido à alta dinâmica, decidimos por uma versão completamente fechada, como você pode ver à esquerda na imagem 4. Isso tem a grande vantagem de que o acessório é muito mais seguro, mas infelizmente também tem uma grande desvantagem: os cabos e os plugues têm que passar por este furo ao desmontar e instalar um novo sistema Scara.
Desafio #3
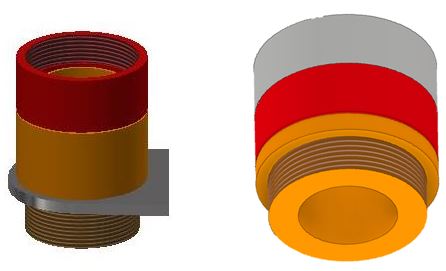
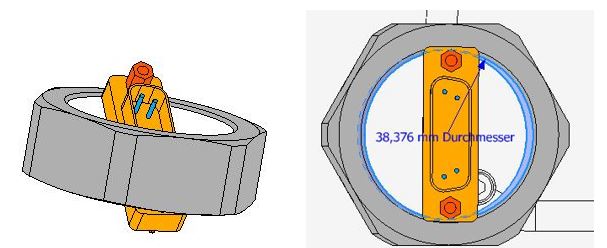
Como passamos o conector Sub-D? Com a conexão entre o fuso de esfera (1) e o painel de controle (2), notamos as conexões Sub-D e descobrimos que as dimensões da conexão rotativa devem ser pelo menos grandes o suficiente para permitir que este tipo de conector seja realizado sem problemas. Como a imagem 6 revela, infelizmente, não foi esse o caso e temos que adaptar o diâmetro interno do alimentador rotativo às dimensões externas do conector Sub-D. Aqui é importante encontrar um meio-termo entre a espessura do material da conexão roscada e a inserção do conector sem problemas.
Na parte 3, vamos esclarecer do que se trata a imagem 7 e que progresso fizemos ou se desenvolveu de forma completamente diferente.