Que tipos de robôs igus existem e qual é o robô certo para minha aplicação?
Rebeca Tarragô | 18th outubro 2021

Tarefas que exigem muito tempo nem sempre são aplicações complexas. Automatizar essas aplicações pode economizar tempo e dinheiro. Existe uma vasta gama de robôs industriais no mercado: robôs lineares, robôs delta, articulações multi-eixos e robôs SCARA. Esse artigo lhe dará uma breve visão geral dos robôs e soluções igus disponíveis no mercado. Quando devo usar qual robô? Quais são as diferenças? Qual robô é apropriado para minha aplicação?
O robô linear modular
Os robôs lineares, também conhecidos como robôs cartesianos ou XYZ, são os robôs mais usados na indústria. Eles consistem em vários sistemas de acionamento linear conectados. Eles geralmente estão no último eixo equipados com um eixo rotativo adicional.
O desenho é sempre muito semelhante: há um eixo básico (eixo X), um eixo transversal montado nele (eixo Y) e um eixo cantilever (eixo Z). O perfil de guia se move ao longo do eixo do cantilever e o carro de guia se move ao longo dos outros dois eixos. Os eixos lineares geralmente são combinados com os eixos rotativos. Os robôs lineares alcançam 3-4 graus de liberdade (DOF). O eixo básico geralmente é projetado com dois eixos e um eixo adicional que sincroniza os dois eixos em paralelo. Isso proporciona maior resistência.
Os robôs lineares são altamente configuráveis e podem ser adaptados a qualquer projeto de máquina. Eles alcançam um volume de trabalho de vários metros para cada dimensão. Eles são muito fáceis de programar, uma vez que os comandos de movimento não precisam ser traduzidos para a cinemática do robô. (Comando de movimento = movimento real do robô). Existem muitas classes de precisão diferentes. Os robôs lineares podem ser usados em quase todas as faixas de carga. Na maioria dos casos, eles lidam com cargas de até 200N (20kg). Os robôs lineares da igus são normalmente usados com os seguintes parâmetros de aplicação.

A igus oferece este tipo de robô completo com sistema de controle de robô ou, em alternativa, apenas com controladores de motor. Também pode ser preparado para motores do cliente.
O robô rápido: a cinemática paralela do robô delta
Os robôs delta, também conhecidos como robôs paralelos ou robôs aranha, consistem em três sistemas lineares, todos orientados em um ponto central. Geralmente, há duas configurações de robô delta:
robôs delta com eixos lineares : a vantagem dessa variante é a capacidade de obter forças de processo maiores. Ele também tem melhor segurança e funciona mais suavemente sob forças radiais no sistema.
Robô Delta com cinemática paralela de braço duplo : sua menor massa permite maior velocidade e aceleração. Os robôs Delta têm um design especial, são mais difíceis de programar e, portanto, estão disponíveis apenas com um conceito de controle. Equipados com um eixo rotativo adicional, eles alcançam um máximo de 3-4 graus de liberdade (DOF).

A cinemática desse robô é ideal para uso em aplicações pick-and-place. Eles são usados para classificar produtos na indústria alimentícia, eletrônica e farmacêutica e para processos de montagem com transportadores circulares.
A cinemática paralela, como os robôs delta, pode atingir velocidades de até 200 picks por minuto com uma precisão de 0,5 mm. Nessas velocidades, você deve certificar-se de que os periféricos, como garras e sistemas de visão, possam agarrar e soltar com rapidez suficiente. O robô igus delta pode ser usado em velocidades de até 60 picks por minuto. Ele pode classificar um produto por segundo com repetibilidade de 0,5 mm. Esse é um tempo de processo típico da indústria. O robô pode ser entregue com um sistema de controle de robô completo (igus Robot Control) ou com controles de motor ou preparado para o motor individual do cliente.

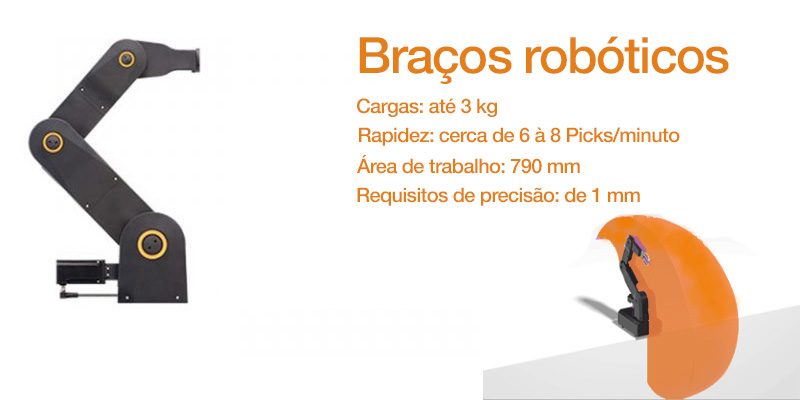
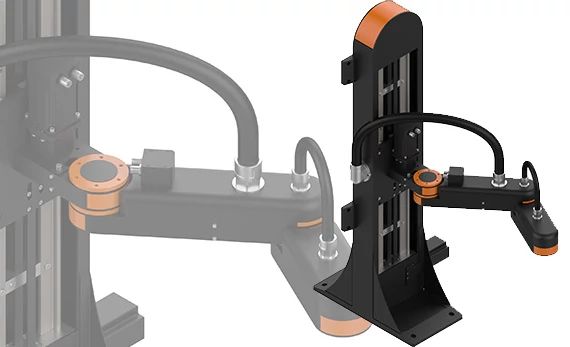
Flexível: braços robóticos articulados
Os braços robóticos articulado, também conhecidos como robôs articulados, são projetados como o braço humano e normalmente têm de 4 a 6 graus de liberdade (DOF). Para atingir uma grande variedade de robôs, os robôs são frequentemente instalados em um eixo linear, o chamado sétimo eixo. Os robôs articulados podem ser usados com muita flexibilidade. Eles sempre têm um design fixo e não podem ser integrados em todas as máquinas. Este tipo de robô é normalmente usado fora do conceito de máquina como uma solução autônoma.
As aplicações típicas são paletização, preensão, inspeção ou soldagem. Este tipo de robô pode ser encontrado em todas as indústrias.
O robô articulado é mais lento, menos preciso e mais difícil de integrar do que outros robôs, mas pode ser usado para qualquer aplicação. Este tipo de robô pode suportar pesos de até 250kg com uma precisão de até 0,1mm. O robô articulado robolink da igus pode ser usado com uma precisão de 1mm com cargas de até 3kg. Ele pode implementar aplicativos com tempos de processamento de oito segundos. Um processo é agarrar e depositar as peças.
O robô articulado reduzido: robôs SCARA
O robô SCARA possui quatro graus de liberdade (4DOF). Existem dois designs comuns: um em que todo o braço é movido verticalmente e outro em que o último eixo é movido verticalmente. Todos os outros eixos são eixos rotativos. O espaço de trabalho para a cinemática deste robô é em forma de rim. As áreas de aplicação típicas são tarefas de montagem e união na indústria eletrônica. Na maioria dos casos, é utilizado para cargas de até 15kg. Seu design oferece velocidades de processo entre as da cinemática delta e linear: mais lentas do que os robôs delta, mais rápidos do que os lineares.
A igus desenvolveu recentemente sua versão de robô SCARA em sua linha de produtos; esses robôs são configurados individualmente para clientes a partir de conjuntos padronizados. Uma tecnologia de motor de passo com codificador totalmente integrado com o software de controle de robôs da igus. Com velocidades de processo de 3 segundos!
Qual robô é o certo para minha aplicação?
Fundamentalmente, existem muitos fatores que influenciam a seleção do robô. Você pode encontrá-los em nossa lista de verificação. O fator de influência mais importante consiste na:
Precisão necessária no intervalo de tempo do ciclo do processo de carga útil do ponto operacional graus de liberdade. É importante selecionar apenas o número de graus de liberdade de que você precisa. Cada eixo adicional significa esforço de programação, complexidade e suscetibilidade a erros.
Sinta-se a vontade para entrar em contato conosco. Ficaremos muito felizes em lhe fornecer uma consultoria gratuita sobre a cinemática mais adequada à sua aplicação!
(11) 94495-8828

