O que são robôs pick and place e como funcionam?
Rebeca Tarragô | 7th novembro 2023
As atividades de pick and place são algumas das mais comumente automatizadas hoje em dia devido à sua simplicidade e natureza repetitiva. No entanto, isso significa que as opções disponíveis para robôs pick and place são vastas e as vezes, pode ser difícil escolher o sistema ideal para a aplicação em questão.
É importante compreender os diferentes tipos de robôs pick and place para escolher a solução ideal para sua aplicação. Ao final deste artigo, você terá as informações necessárias para lhe ajudar a fazer a escolha adequada do robô pick and place.
O que os robôs pick and place fazem?
Simplificando, os robôs escolhem e posicionam os produtos e os movem de um lugar para outro. Eles são usados com mais frequência em aplicações de alto rendimento, como as indústrias de embalagens, alimentos e bebidas.

Tipos de robôs pick and place
Os robôs usados em aplicações de coleta e colocação podem variar muito. Abaixo estão alguns dos mais comuns.
Robôs de pórtico
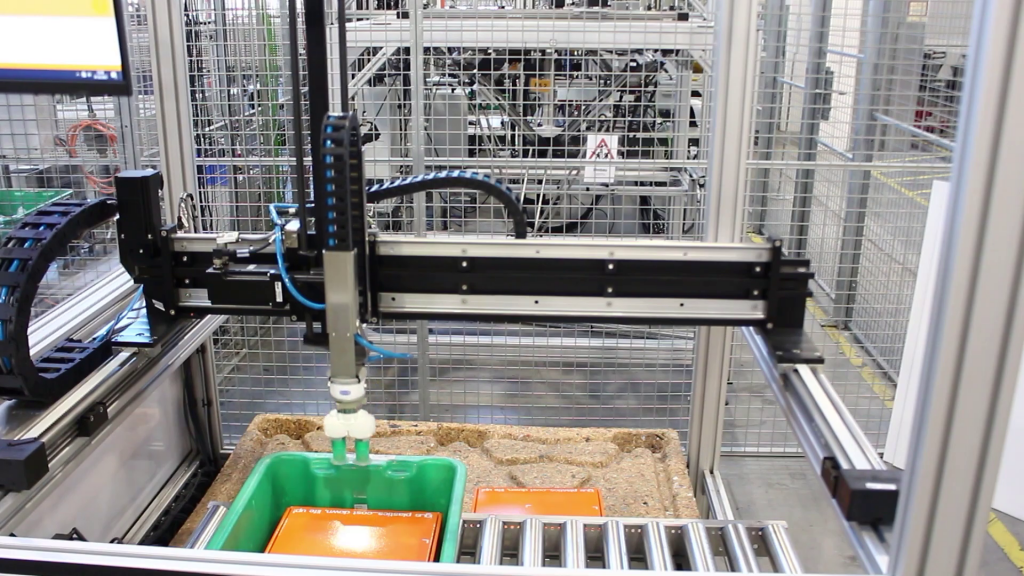
Os robôs Gantry são robôs lineares que se movem ao longo de três planos (X, Y e Z). Eles são caracterizados pela alta precisão posicional e pela capacidade de cobrir espaços de trabalho maiores do que a maioria dos outros robôs pick and place.
Robôs Delta
Os robôs Delta são robôs paralelos que consistem em três braços conectados a uma junta comum acima e abaixo dos braços. Sua maior vantagem é a velocidade, que custa menos cargas úteis do que outros robôs pick and place.

Braços Robóticos

Os braços robóticos de 5 e 6 eixos são os robôs pick and place mais comumente usados devido à sua versatilidade. A liberdade de movimento de que são capazes os torna adequados para aplicações que exigem movimentos complexos.
Robôs Colaborativos (Cobots)
Os cobots são projetados para trabalhar ao lado de funcionários humanos para ajudá-los a trabalhar com mais eficiência. Em aplicações de seleção e colocação, isso normalmente significa cobots do tipo AGV que levam os humanos a escolher locais usando a rota mais ideal disponível; no entanto, os cobots do tipo braço robótico também podem ser usados em uma ampla gama de aplicações de coleta e colocação.
Por que você deve usar robôs pick and place?
Há uma ampla gama de benefícios no uso de robôs em vez de trabalhadores humanos para aplicações de coleta e colocação. Esses benefícios incluem:
Produtividade
Como os robôs são capazes de trabalhar 24 horas por dia, sem interrupções e em ritmo mais rápido do que os trabalhadores humanos, eles são inerentemente muito mais produtivos. Isso significa um rendimento mais alto e, em última análise, maiores lucros e retorno do investimento.
Confiabilidade
Os robôs não são propensos a cometer erros como os humanos e, portanto, sua confiabilidade e consistência são muito maiores. Os robôs de “coleta e colocação” (tradução livre do termo Pick and Place) podem ter precisão de menos de um milímetro para cada coleta ao longo da vida útil do robô.
Segurança
Em qualquer situação em que trabalhadores humanos transportem produtos, há risco de ferimentos. Os trabalhadores podem tropeçar ou deixar cair produtos sobre si mesmos, causando ferimentos potencialmente graves. Com os robôs não há risco de ferimentos ou outros danos, tornando-os uma escolha muito mais segura para aplicações de coleta e colocação.
Retorno do investimento
Como os robôs pick and place são capazes de trabalhar de forma mais rápida e eficiente do que os humanos, eles proporcionam um retorno do investimento mais rápido. Portanto, embora o investimento inicial seja significativamente maior com robôs, eles são uma opção muito mais econômica no longo prazo. Isto é especialmente verdadeiro no que diz respeito às ofertas disponíveis em RBTX.com, um mercado on-line de robótica para componentes e soluções de baixo custo.

Aplicações para robôs pick and place
A flexibilidade dos robôs pick and place permite que eles sejam usados em inúmeras aplicações. Saiba mais sobre alguns dos aplicativos mais comuns abaixo.
Ordenação
Os aplicativos de classificação exigem robôs de seleção e colocação para classificar as peças com base em características específicas, como tamanho, cor ou formato.
Coleta de lixo
Na coleta de caixas, os robôs pegam peças de uma caixa com a ajuda de um sistema de visão que ajuda o robô a determinar a cor, o tamanho ou a forma de uma peça, mesmo que ela esteja misturada com uma variedade de peças diferentes.
Embalagem
Os robôs de coleta e colocação podem mover produtos para caixas e outros recipientes para serem embalados em aplicações de embalagem. Isso pode ser feito em uma área designada ou até mesmo em uma esteira transportadora.
Inspeção
Com um sistema de visão avançado, os robôs pick and place podem pegar objetos e inspecioná-los visualmente, procurando defeitos e removendo peças defeituosas da linha de produção.
Conjunto
Os robôs de seleção e colocação podem pegar peças recebidas de uma montagem maior e anexar essas peças a outras peças da montagem antes de movê-las para serem transportadas para o próximo estágio da montagem.
Como escolher o robô pick and place certo
Com a grande variedade entre os diferentes tipos de robôs pick and place, escolher o adequado para sua aplicação é de extrema importância. Existem alguns fatores-chave em uma aplicação que determinarão a solução robótica ideal.
Velocidade
O rendimento necessário de uma aplicação determinará a velocidade de seleção necessária. Os robôs Delta são os robôs de coleta e colocação mais rápidos em termos de coletas/minuto e muitas vezes serão a escolha ideal para aplicações de coleta rápida, desde que atendam a todos os outros requisitos da aplicação.
Flexibilidade
Algumas aplicações de escolha e colocação, como a classificação, exigirão que os robôs distingam entre diferentes tipos de produtos e os coloquem de acordo. Este nível de flexibilidade está limitado a braços robóticos equipados com sistemas de visão avançados. Aplicações mais simples, onde o mesmo produto é movido consistentemente do ponto A para o ponto B, não exigirão o mesmo nível de flexibilidade de um robô de coleta e colocação.
Carga útil
A carga útil é outro fator essencial na escolha de robôs pick and place; se um robô não for capaz de lidar com a carga útil do produto que deve levantar, é provável que sofra desgaste rápido e possível falha. A carga útil também terá impacto na velocidade com que as coletas podem ser feitas, com cargas mais pesadas exigindo mais tempo por coleta.
Repetibilidade
A repetibilidade – também conhecida como precisão posicional – é a precisão do movimento de um robô. Para aplicações que exigem que os produtos sejam colocados em locais muito específicos, como em tarefas de montagem, é vital um alto nível de repetibilidade.
Área de trabalho
O espaço de trabalho disponível para um robô pick and place terá um impacto direto no tamanho do robô que pode ser usado em uma aplicação. Aplicações que abrangem espaços particularmente grandes são mais adequadas para robôs de pórtico ou cobots, por exemplo.
Conclusão
À medida que mais empresas recorrem à automação para aumentar a produção e os lucros, torna-se cada vez mais importante que empresas de todos os tamanhos implementem a automação sempre que possível para acompanhar a concorrência. Os robôs pick and place, em particular, oferecem vantagens significativas sobre o trabalho humano e só se tornarão cada vez mais proeminentes nos próximos meses e anos.
Para saber mais sobre os produtos e soluções de automação da igus, visite a nossa página web! Para dúvidas sobre um produto ou aplicação específica, entre em contato com um especialista hoje mesmo.
Confira o vídeo abaixo para ter uma visão geral bem visual de nossas soluções atuando na prática! 🙂