Como funciona a autoprogramação de Robôs da igus®?
Miriam Araldi | 21st fevereiro 2022
Com o software correspondente, você pode programar e movimentar o robô através de uma interface gráfica de usuário.

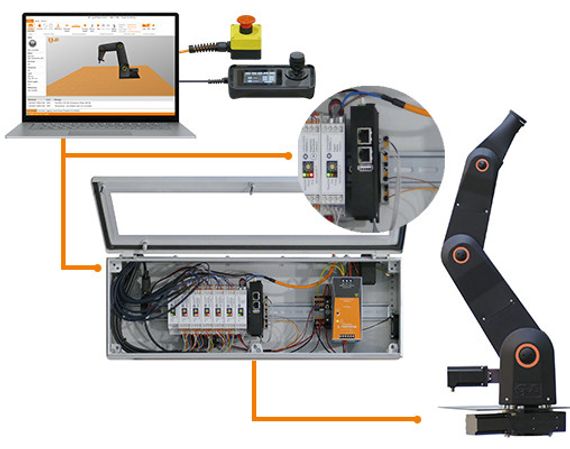
Visão geral do sistema
Sistema robótico padrão é composto por três componentes:
- Robô; dependendo da aplicação como braço articulado, robô delta ou sistemas de módulos lineares multiaxiais drylin®.
- Sistema de controle de robôs: quadro de controle ou trilho (DIN); o quadro de controle fechado com sistema integrado protege o sistema de agentes ambientais externos, como pó ou umidade, além disso, uma ventoinha fornece o resfriamento necessário.
- Software de sistema de controle com interface gráfica de usuário e gêmeo digital da cinemática do robô.
Como funciona o Software de controle?

O Software de controle permite uma programação e controle de robôs simples e intuitivo e uma entrada fácil no mundo da automação. Devido ao design modular, é possível controlar diferentes cinemáticas dos robôs, por exemplo, robôs delta, robôs lineares e juntas multiaxiais para robôs. O software pode ser utilizado para simular os movimentos individuais do robô na interface 3D – o robô não necessita de estar conectado para este passo.
Sistema de controle de robôs programável através de um PC com Windows, opcionalmente com dispositivo de controle portátil
O robô é controlado através de um elemento de controle ou em alternativa através de um PC com Windows. O robô pode ser programado através de uma interface gráfica de utilizador. Você também pode conectar um game pad ao seu computador Windows para o sistema de controle como uma alternativa ao computador de mão. Com esta configuração, o robô funciona de forma autônoma sem recurso ao computador, apenas necessário para realizar a programação.
Requisitos para utilizar o sistema:
- PC com sistema operativo Windows 10,
- Porta USB 2.0 livre, porta Ethernet,
- 500 MB de espaço de armazenagem
Compatibilidade do sistema e transferência de dados para maior flexibilidade:
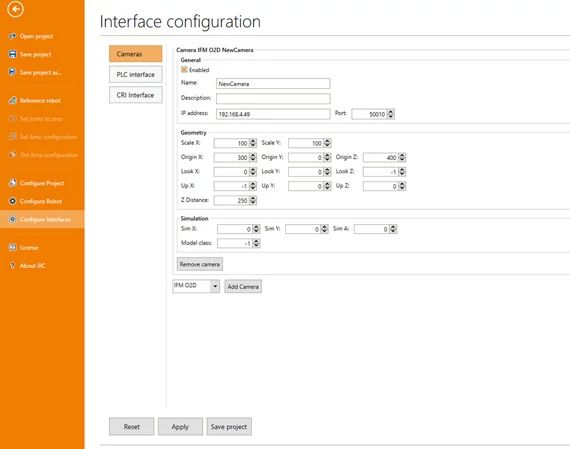
Interface plug-in: o sistema de controle para robôs possibilita uma interface plug-in. Permite conectar, por exemplo, sistemas de processamento de imagem ou componentes PLC. Com várias funções definidas, os plug-ins representam uma ponte entre a execução do programa no software do sistema de controle e os sistemas externos. Por exemplo, as câmeras integradas podem transmitir automaticamente as posições desejadas para o sistema de controle do robot. Os plug-ins podem ser fornecidos pela igus®, ou podem ser criados em uma base específica do projeto.
Interface PLC: A interface PLC (PLC = Controlador Lógico Programável) permite a integração do robô em um sistema de produção controlado por um PLC. Na maioria dos casos, isto é feito através de entradas e saídas digitais. Desta forma, o robô pode ser controlado sem interação manual.
Também é possível ligar um painel de controle adicional aos robôs, com um botão de pressão para simplificar o controle manual.
Conexão Ethernet: a conexão Ethernet do sistema de controle modular permite a ligação do controlador do robô igus® com os algoritmos específicos da aplicação, como um sistema de teleoperação ou uma base de dados. Isto é garantido através de uma interface CRI Ethernet.
Downloads disponíveis:
- Instruções de operação igus® Robot Control com robolink® DP
- Preferência de controle de robô igus®
- Instruções de operação igus® Robot Control com robôs lineares drylin®
Saiba mais em: https://www.igus.com.br/info/robot-software, ou, em nosso canal: https://www.youtube.com/c/contatoIgus/videos